Βιομηχανικός κινητήρας υποστήριξης Yaskawa Electric 4500 W 1500 RPM SERVO MOTOR SGMDH-45A2B-YR14
Γρήγορες λεπτομέρειες
Πρότυπο SGMDH-45A2B-YR14
Τύπος προϊόντος
Κατηγορία ισχύος 4500w
Δομική ροπή 28,4Nm
Διορισμένη ταχύτητα 1500RPM
Δυναμική παροχή τάσης 200vAC
Κατηγοριοποιημένο ρεύμα 32,4 Amps
ΑΛΛΑ ΠΡΟΔΟΤΑ ΤΑΥΤΟΥ
Γιασάκαβα Μότορ, Οδηγός SG- Mitsubishi Motor HC-, HA-
Μονάδες Westinghouse 1C, 5X- Emerson VE, KJ-
Μηχανή Honeywell TC-, TK- Fanuc A0-
Ροζμάουντ 3051- Yokogawa EJA-
ΑΠΟΛΙΚΕΣ ΕΠΙΤΡΟΠΟΙ
| SGMDH |
περιγραφή |
κατασκευαστής |
| SGMDH-056A2A-YR25 |
ΣΕΡΒΟΜΟΤΟΡΙΟ SGMDH056A2AYR25 |
Γιάσκαβα |
| SGMDH-06A2 |
Δοκιμαστική μηχανή SGMDH06A2 |
Γιάσκαβα |
| SGMDH-06A2A-TR25 |
Δοκιμαστικό SGMDH06A2ATR25 |
Γιάσκαβα |
| SGMDH-06A2A-YR |
Δοκιμαστική μηχανή SGMDH06A2AYR |
Γιάσκαβα |
| SGMDH-06A2A-YR11 |
Δοκιμαστική μηχανή SGMDH06A2AYR11 |
Γιάσκαβα |
| SGMDH-06A2A-YR12 |
Δοκιμαστικό SGMDH06A2AYR12 |
Γιάσκαβα |
| SGMDH-06A2A-YR13 |
Δοκιμαστική μηχανή SGMDH06A2AYR13 |
Γιάσκαβα |
| SGMDH-06A2A-YR14 |
Δοκιμαστική μηχανή SGMDH06A2AYR14 |
Γιάσκαβα |
| SGMDH-06A2A-YR24 |
Δοκιμαστικό SGMDH06A2AYR24 |
Γιάσκαβα |
| SGMDH-06A2A-YR25 |
Δοκιμαστικό SGMDH06A2AYR25 |
Γιάσκαβα |
| SGMDH-06A2A-YR26 |
SGMDH06A2AYR26 2,63NM 550W 4AMP 2000RPM 200V |
Γιάσκαβα |
| SGMDH-12A2 |
Δοκιμαστικό SGMDH12A2 |
Γιάσκαβα |
| SGMDH-12A2A-YA14 |
Δοκιμαστική μηχανή SGMDH12A2AYA14 |
Γιάσκαβα |
| SGMDH-12A2A-YR |
Δοκιμαστική μηχανή SGMDH12A2AYR |
Γιάσκαβα |
| SGMDH-12A2A-YR12 |
Δοκιμαστική μηχανή SGMDH12A2AYR12 |
Γιάσκαβα |
| SGMDH-12A2A-YR13 |
SGMDH12A2AYR13 AC 2000RPM 1150W 200V 7.3AMP 5.49NM |
Γιάσκαβα |
| SGMDH-12A2A-YR14 |
Δοκιμαστική μηχανή SGMDH12A2AYR14 |
Γιάσκαβα |
| SGMDH-12A2A-YR15 |
Δοκιμαστική μηχανή SGMDH12A2AYR15 |
Γιάσκαβα |
| SGMDH-12A2A-YR21 |
Δοκιμαστική μηχανή SGMDH12A2AYR21 |
Γιάσκαβα |
| SGMDH-12A2A-YRA1 |
Δοκιμαστική μηχανή SGMDH12A2AYRA1 |
Γιάσκαβα |
| SGMDH-13A2A-YR23 |
Δοκιμαστικό SGMDH13A2AYR23 |
Γιάσκαβα |
| SGMDH-20A2A21 |
Δοκιμαστική μηχανή SGMDH20A2A21 |
Γιάσκαβα |
| SGMDH-22A2 |
Δοκιμαστική μηχανή SGMDH22A2 |
Γιάσκαβα |
| SGMDH-22A2A-YR11 |
SGMDH22A2AYR11 SIGMA II 2.2KW L/U AXIS SK45X |
Γιάσκαβα |
| SGMDH-22A2A-YR12 |
Δοκιμαστική μηχανή SGMDH22A2AYR12 |
Γιάσκαβα |
| SGMDH-22A2A-YR13 |
Δοκιμαστική μηχανή SGMDH22A2AYR13 |
Γιάσκαβα |
| SGMDH-22A2A-YR13YA |
Δοκιμαστική μηχανή SGMDH22A2AYR13YA |
Γιάσκαβα |
| SGMDH-22A2A-YR14 |
Δοκιμαστικό SGMDH22A2AYR14 |
Γιάσκαβα |
| SGMDH-22A2A-YR32 |
Δοκιμαστική μηχανή SGMDH22A2AYR32 |
Γιάσκαβα |
| SGMDH-22ACA61 |
Δοκιμαστική μηχανή SGMDH22ACA61 |
Γιάσκαβα |
| SGMDH-30A2A-YR31 |
Δοκιμαστική μηχανή SGMDH30A2AYR31 |
Γιάσκαβα |
| SGMDH-30A2A-YR32 |
Δοκιμαστική μηχανή SGMDH30A2AYR32 |
Γιάσκαβα |
| SGMDH-32A2 |
Δοκιμαστική μηχανή SGMDH32A2 |
Γιάσκαβα |
| SGMDH-32A2A |
Δοκιμαστική μηχανή SGMDH32A2A |
Γιάσκαβα |
| SGMDH-32A2A-YA14 |
Δοκιμαστική μηχανή SGMDH32A2AYA14 |
Γιάσκαβα |
| SGMDH-32A2A-YR11 |
Δοκιμαστική μηχανή SGMDH32A2AYR11 |
Γιάσκαβα |
| SGMDH-32A2A-YR12 |
Δοκιμαστική μηχανή SGMDH32A2AYR12 |
Γιάσκαβα |
| SGMDH-32A2A-YR13 |
SGMDH32A2AYR13 AC 3.2KW SIGMA 2 S-AXIS |
Γιάσκαβα |
| SGMDH-32A2A-YR14 |
Δοκιμαστική μηχανή SGMDH32A2AYR14 |
Γιάσκαβα |
| SGMDH-32A2A-YR51 |
Δοκιμαστική μηχανή SGMDH32A2AYR51 |
Γιάσκαβα |
| SGMDH-32A2A-YRA1 |
ΣΕΡΒΟΜΟΤΟΡΙΟ SGMDH32A2AYRA1 |
Γιάσκαβα |
| SGMDH-32ACA-MK11 |
SGMDH32ACAMK11 SERVO MOTOR |
Γιάσκαβα |
| SGMDH-32P5A |
Δοκιμαστική μηχανή SGMDH32P5A |
Γιάσκαβα |
| SGMDH-40A2 |
Δοκιμαστική μηχανή SGMDH40A2 |
Γιάσκαβα |
| SGMDH-40A2A |
Δοκιμαστική μηχανή SGMDH40A2A |
Γιάσκαβα |
| SGMDH-40ACA21 |
Δοκιμαστική μηχανή SGMDH40ACA21 |
Γιάσκαβα |
| SGMDH-44A2A-YR14 |
Δοκιμαστική μηχανή SGMDH44A2AYR14 |
Γιάσκαβα |
| SGMDH-44A2A-YR15 |
ΣΕΡΒΟΜΟΤΟΡΙΣΜΟΣ SGMDH44A2AYR15 |
Γιάσκαβα |
| SGMDH-45A2A6C |
Δοκιμαστική μηχανή SGMDH45A2A6C |
Γιάσκαβα |
| SGMDH-45A2B61 |
Δοκιμαστική μηχανή SGMDH45A2B61 |
Γιάσκαβα |
| SGMDH-45A2BYR |
Δοκιμαστική μηχανή SGMDH45A2BYR |
Γιάσκαβα |
| SGMDH-45A2B-YR13 |
ΣΕΡΒΟΜΟΤΟΡΙΟ SGMDH45A2BYR13 |
Γιάσκαβα |
| SGMDH-45A2BYR14 |
ΣΕΡΒΟΜΟΤΟΡΙΣΜΟΣ SGMDH45A2BYR14 |
Γιάσκαβα |
| SGMDH-45A2B-YR14 |
ΣΕΡΒΟΜΟΤΟΡΙΣΜΟΣ SGMDH45A2BYR14 |
Γιάσκαβα |
| SGMDH-45A2BYR15 |
ΣΕΡΒΟΜΟΤΟΡΙΣΜΟΣ SGMDH45A2BYR15 |
Γιάσκαβα |
| SGMDH-45A2B-YR15 |
ΣΕΡΒΟΜΟΤΟΡΙΣΜΟΣ SGMDH45A2BYR15 |
Γιάσκαβα |
| SGMDH-6A2A-YR13 |
Δοκιμαστική μηχανή SGMDH6A2AYR13 |
Γιάσκαβα |
| SGMDH-6A2A-YR25 |
Δοκιμαστική μηχανή SGMDH6A2AYR25 |
Γιάσκαβα |
| SGMDH-A2 |
Δοκιμαστική μηχανή SGMDHA2 |
Γιάσκαβα |
| SGMDH-A2A |
Δοκιμαστική μηχανή SGMDHA2A |
Γιάσκαβα |
• Με το κλείσιμο του βήματος ταχύτητας καθώς και του βήματος θέσης στον υπολογιστή, μπορεί να χρησιμοποιηθεί μία και μόνο συσκευή ανατροφοδότησης για τα δύο.Η προσέγγιση υπολογιστή ανά άξονα είναι επωφελής εάν επιλέγονται πολύ υψηλά ποσοστά ενημέρωσης για το βρόχο ταχύτηταςΜε πολλαπλούς άξονες, το φορτίο σε έναν κεντρικό υπολογιστή μπορεί να είναι πολύ μεγάλο με υψηλές ταχύτητες αναβάθμισης.
• Εάν προβλέπεται μεγάλη συντονισμένη κίνηση, ένας κεντρικός υπολογιστής θα έχει άμεση πρόσβαση σε κάθε άξονα.οι συνδέσεις επικοινωνίας μεταξύ υπολογιστών προκαλούν καθυστερήσεις που περιορίζουν τον στενό συντονισμόΟι κυκλώσεις ταχύτητας μπορούν να παραμείνουν αναλογικές με την προσέγγιση του κεντρικού υπολογιστή για να διευκολυνθεί αυτό.
Ένα διάγραμμα Bode, όπως αυτό που φαίνεται παρακάτω, βοηθά στην ποσοτικοποίηση του πόσο καλά η έξοδος ή η ανατροφοδότηση (F), ακολουθεί την εντολή (C) δείχνοντας τη σχέση μεταξύ A και της συχνότητας διέγερσης.Η συχνότητα εκφράζεται συνήθως σε ραδιάνια/δευτερόλεπτο..(ω) αντί για κύκλους ανά δευτερόλεπτο (f). Εφόσον ω = 2πf ≈ 6.28 f, είναι εύκολο να μετατραπεί από το ένα στο άλλο. Επίσης, 1/ω, σε δευτερόλεπτα, είναι η σταθερή χρόνου ενός φίλτρου χαμηλής διέλευσης με εύρος ζώνης f.Μόλις γνωρίζουμε το εύρος ζώνης (ω) ενός servo, γνωρίζουμε τη σταθερή χρόνου του ισοδύναμου φίλτρου (1/ω) και μπορούμε έτσι να προβλέψουμε την απόκρισή του σε μια είσοδο βήματος.
Για τι χρησιμεύουν οι σταδιακοί κινητές;
Τοποθέτηση ∆εδομένου ότι τα βήματα μετακινούνται σε ακριβή επαναληπτά βήματα, υπερέχουν σε εφαρμογές που απαιτούν ακριβή
Ορισμένες μονάδες οδήγησης δίσκου χρησιμοποιούν επίσης σταπ κινητήρες για την τοποθέτηση του κεφαλιού ανάγνωσης / εγγραφής.
Ελέγχος ταχύτητας ∆ ακριβείς αυξήσεις της κίνησης επιτρέπουν επίσης εξαιρετικό έλεγχο της ταχύτητας περιστροφής για
αυτοματισμού διαδικασιών και ρομποτικής.
Χαμηλής ταχύτητας ροπή - Οι κανονικοί κινητήρες συνεχούς ρεύματος δεν έχουν πολύ ροπή σε χαμηλές ταχύτητες.
μέγιστη ροπή σε χαμηλές ταχύτητες, έτσι ώστε να είναι μια καλή επιλογή για εφαρμογές που απαιτούν χαμηλές ταχύτητες με υψηλή
Ακριβότητα.
Πολλοί χρήστες ελέγχου κίνησης έχουν ακούσει τους προμηθευτές να προσπαθούν να εξηγήσουν ορισμένα χαρακτηριστικά του servo χρησιμοποιώντας διαγράμματα Bode.Η σωστή προφορά είναι "Bo-dee"Θα βρείτε άλλες ομοιότητες μεταξύ των δύο (ποιον κοροϊδεύω;), όπως ο αριθμός 10, όπως θα δούμε.

 Το μήνυμά σας πρέπει να αποτελείται από 20-3.000 χαρακτήρες!
Το μήνυμά σας πρέπει να αποτελείται από 20-3.000 χαρακτήρες!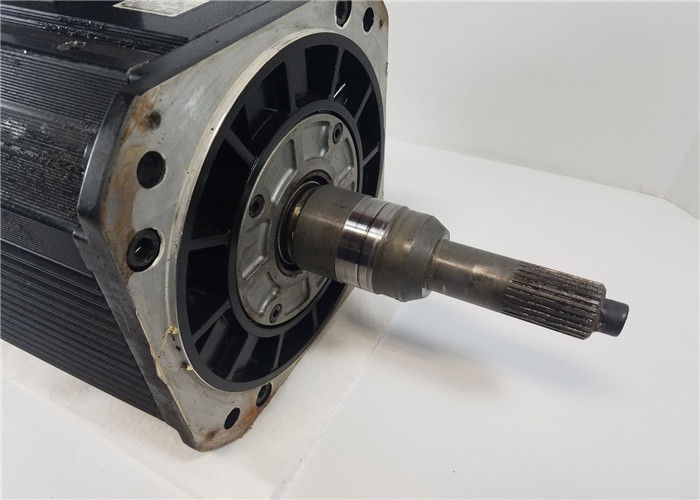
Συνολική Αξιολόγηση
Εικόνα βαθμολόγησης
Ακολουθεί η κατανομή όλων των αξιολογήσεωνΌλες οι κριτικές