ΣΕΡΒΟ ΜΗΧΑΝΉ 0.44A sgmah-A3B1A21 εναλλασσόμενου ρεύματος Yaskawa ηλεκτρική 0.095N.m βιομηχανική 30W InsB
Λεπτομέρειες στοιχείων
Πρότυπο sgmah-A3B1A21
Σερβο μηχανή εναλλασσόμενου ρεύματος τύπων προϊόντων
Εκτιμημένη παραγωγή 30w
Εκτιμημένο Torque0.095 NM
Εκτιμημένη ταχύτητα 3000RPM
Τάση 200vAC παροχής ηλεκτρικού ρεύματος
Εκτιμημένο τρέχον 0.44Amps
ΑΛΛΑ ΑΝΩΤΕΡΑ ΠΡΟΪΟΝΤΑ
Μηχανή Yasakawa, μηχανή HC-, εκτάριο SG Mitsubishi οδηγών
Ενότητες 1C-, 5X- Emerson VE, KJ Westinghouse
Honeywell TC, μηχανή A0- TK- Fanuc
Συσκευή αποστολής σημάτων 3051 Rosemount - συσκευή αποστολής σημάτων EJA- Yokogawa
Πρόσωπο επαφών: Anna
Ηλεκτρονικό ταχυδρομείο: το wisdomlongkeji@163.com
Κινητό τηλέφωνο: +0086-13534205279
ΠΑΡΟΜΟΙΑ ΠΡΟΪΟΝΤΑ
SGMPH-15AAA21 SGMPH-15A1A-YR11 USAPEM-07YR23 SGM-01U3B4L
SGM-08A314S SGMAH-A3A1A4S SGMAH-02A1A4C SGMAS-01A2A41
SGMAH-A6AAA21 SGM-02VGNK13 SGMAS-A5ACA2C SGMAS-01ACA2C
SGMAS-02ACA21 SGMG-09A2A SGME-01AF14 SGM-01A314
SGMAH-01BAA4C SGM-02B314 SGMAS-06ACA2C SGMAS-07ARB-AB11
SGMAH-08A1A21 SGMG-05A2A SGMG-20A2AB SGMG-20A2A
SGMP-02B314C SGMPH-04AAA21 SGMAS-04A2A-FJ13 SGM-02U3B4L
SGM-02A314 SGMSH-20ACA21 SGMPH-15AAA-TE21 SGMPH-01AAE4CD
SGM-01AWSU12 SGM-01AGSU11 SGME-01AF14 SGM-02AGSU11
SGMP-04U314M SGMAH-04AAA-FJ12 USAREM-02CF2 USAREM-08FJ11
SGMGH-05ACA21 SGM-02U3B2L USASEM-18YR24 SGMAH-04AAAH761
SGMMJ-A3BABA1 SGMP-01U314CM SGM-01BX SGM-A3AFJ71 USAREM-02CE2KX
SGM-55ASA SGMPH-01AAE-YA11 SGM-08AWFJ83 SGM-08AWFJ83X
SGMG-09AWAAB SGM-15AWA-HG13 SGMG-05AWAAB SGMP-15AW16DP
USAREM-03DE2USAQEM-03-SU21 USAQEM-A6-SU31 USAQEM-05AA2KX USADEM-13-NT25
SGMP-04AS14 SGML-04AF12C SGMP-04A314E SGMPH-04A1E-TM21
SGME-04AF12 UGTMEM-03LSK21 SGM-02A612B SGMAH-A5A1A41
SGMPH-08AAA21 SGMSH-20ACA-FJ12
SGM-A5A312 SGM-A3A314 SGM-A3A321 SGMSH-15A2A21
USAREM-02CE2 SGM-02A5FJ12 SGMSH-08A1A4D SGM-08A312P
SGM-01B312 sgmas-01a2a-AD11 SGMp-04AAA21
SGMAH-02A1F-AP11 SGMAH-A5AAA41 USAREM-03BE2KX SGMG-1AA2ABC
SGMGH-55DCA6C SGMG-30ASA SGMG-20VSAA3 SGMG-05AWAD SGMG-09ASA
SGMG-20VSR SGMG-09V2RC3 SGMG-20AWAA3 SGMG-30V2AAB SGMKS-20A3A21X2
Αυτό που συμβαίνει πότε το σύστημα είναι στην κίνηση; Θεωρήστε ότι A2 είναι ένας χαρακτηριστικός συνδυασμός κίνησης και μηχανών. Το λάθος E2 θα αναγκάσει την κίνηση για να τρέξει και η ταχύτητα με την οποία τρέχει είναι ανάλογη προς την αξία E2. Το μεγαλύτερο E2 είναι, όσο γρηγορότερη η μηχανή θα πάει. Αυτό λέει ένας ότι η παραγωγή (ανατροφοδοτήστε) δεν θα είναι ακριβώς συμπίπτουσα με την εντολή ενώ στην κίνηση και, στην πραγματικότητα, την παραγωγή F2 θα καθυστερήσει την εντολή C2 από το ποσό του λάθους E2. Γρηγορότερο πηγαίνει, περισσότερες θα είναι η καθυστέρηση. Αυτό είναι κακό για την καλή λειτουργία κυρίου/σκλάβων, η οποία απαιτεί ότι ο σκλάβος F2 ακολουθεί ακριβώς το κύριο F1.
Εάν μια ενότητα λογισμικού (σ) παρεμβάλλεται μεταξύ F1 και C2 διάφορα πράγματα μπορούν να ολοκληρωθούν.

Δεδομένου ότι το κέρδος του βρόχου A2 σκλάβων είναι γνωστό, η αξία E2 μπορεί να προβλεφθεί σε οποιαδήποτε επιθυμητή ταχύτητα. Αυτό σημαίνει ότι η εντολή C2 μπορεί να προσαρμοστεί από εκείνο το υπολογισμένο λάθος E2 στην αιτία
F2 για να είναι συμπίπτων με F1. Η ενότητα λογισμικού (σ) θα σχεδιαστεί έτσι ώστε: C2 = F1 + E2
Όταν αυτό ολοκληρώνεται, F1 και το F2 είναι συμπίπτοντα.
Επίσης, δεδομένου ότι το S είναι μια ενότητα λογισμικού, είναι δυνατό να χειριστεί με διάφορους άλλους τρόπους να παρασχεθεί η ευελιξία αναφερθείσα νωρίτερα.
Για παράδειγμα, εάν αφήνουμε S = (•Κ) όπου το Κ μπορεί να είναι καθόλου σταθερό, κατόπιν υπάρχει το α συνολικά
εύκαμπτη αναλογία εργαλείων που μπορεί να αλλάξουν κατά βούληση.
Stepper μειονεκτήματα Advantagesand μηχανών
Πλεονεκτήματα
1. Η γωνία περιστροφής της μηχανής είναι ανάλογη προς το σφυγμό εισαγωγής.
2. Η μηχανή έχει την πλήρη ροπή στο σταμάτημα (εάν windings ενεργοποιείται)
3. Ο ακριβείς προσδιορισμός θέσης και η επανάληψη της μετακίνησης από τις καλές stepper μηχανές έχουν μια ακρίβεια
3 – 5% ενός βήματος και αυτού του λάθους είναι μη συσσωρευτικό από ένα βήμα στο επόμενο.
4. Άριστη απάντηση στην αρχική παύση/την αντιστροφή.
5. Πολύ αξιόπιστος από δεν υπάρχει καμία βούρτσα επαφών στη μηχανή. Επομένως η ζωή της μηχανής εξαρτάται απλά από τη ζωή του ρουλεμάν.
6. Η απάντηση μηχανών στους ψηφιακούς σφυγμούς εισαγωγής παρέχει το open-loop έλεγχο, που καθιστά τη μηχανή απλούστερη
και λιγότερο δαπανηρός στον έλεγχο.
7. Είναι δυνατό να επιτευχθεί η πολύ αργόστροφη σύγχρονη περιστροφή με ένα φορτίο που συνδέεται άμεσα με
άξονας.
8. Ένα ευρύ φάσμα των περιστροφικών ταχυτήτων μπορεί να συνειδητοποιηθεί δεδομένου ότι η ταχύτητα είναι ανάλογη προς τη συχνότητα
σφυγμοί εισαγωγής.

 Το μήνυμά σας πρέπει να αποτελείται από 20-3.000 χαρακτήρες!
Το μήνυμά σας πρέπει να αποτελείται από 20-3.000 χαρακτήρες!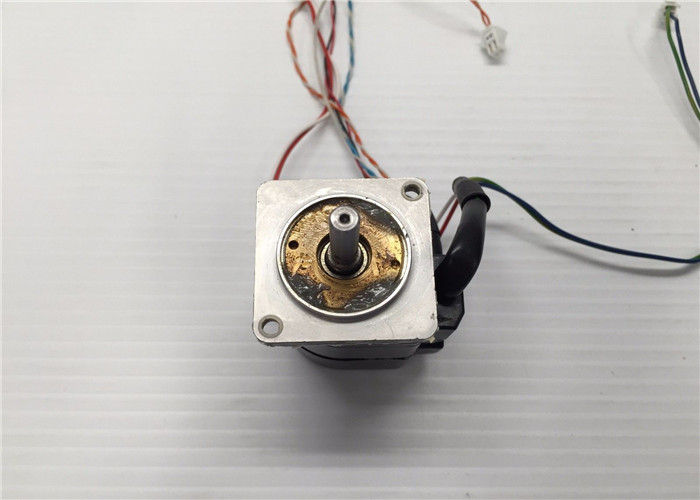
Συνολική Αξιολόγηση
Εικόνα βαθμολόγησης
Ακολουθεί η κατανομή όλων των αξιολογήσεωνΌλες οι κριτικές