YASKAWA SGMAH Sigma II 0.91A 100W AC SERVO MOTOR 3000RMP SGMAH-01AAA41-Y1
Προδιαγραφές
Κατασκευαστής: Yaskawa
Αριθμός προϊόντος: SGMAH-01AAA41-Y1
Περιγραφή: Το SGMAH-01AAA41-Y1 είναι ένας κινητήρας-AC Servo που κατασκευάζεται από την Yaskawa
Τύπος σερβοκινητήρα: SGMAH Sigma II
Ονομαστική ισχύς: 10W (0.07HP)
Τροφοδοσία: 200V
Προδιαγραφές κωδικοποιητή: 13-bit (2048 x 4) Incremental Encoder; Standard
Επίπεδο αναθεώρησης: Standard
Προδιαγραφές άξονα: Ευθύγραμμος άξονας χωρίς αυλάκωση
Αξεσουάρ: Standard; χωρίς φρένο
Επιλογή: Καμία
Τύπος: κανένας
ΑΛΛΑ ΑΝΩΤΕΡΑ ΠΡΟΪΟΝΤΑ
Yasakawa Motor, Driver SG- Mitsubishi Motor HC-,HA-
Westinghouse Modules 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Fanuc motor A0-
Rosemount transmitter 3051- Yokogawa transmitter EJA-
Sυναφή Προϊόντα
SGMAH-A5A1A21
SGMAH-A5A1A2C
SGMAH-A5A1A2E
SGMAH-A5A1A41D
SGMAH-A5A1A4C
SGMAH-A5A1A-YR11
SGMAH-A5A1A-YR31
SGMAH-A5A1F21
SGMAH-A5A1F2C
SGMAH-A5A1F2CD
SGMAH-A5A1F41
SGMAH-A5A4F41
SGMAH-A5AAA21
SGMAH-A5AAA2B
SGMAH-A5AAA61D
SGMAH-A5AAA61D-OY
SGMAH-A5AAAG161
SGMAH-A5AAAG761
SGMAH-A5AAAG761D
SGMAH-A5AAAH161
Οι κινητήρες βημάτων μπορούν συχνά να παρουσιάσουν ένα φαινόμενο που αναφέρεται ως συντονισμός σε ορισμένους ρυθμούς βημάτων. Αυτό μπορεί να φανεί ως ξαφνική απώλεια ή πτώση της ροπής σε ορισμένες ταχύτητες, η οποία μπορεί να οδηγήσει σε χαμένα βήματα ή απώλεια συγχρονισμού. Εμφανίζεται όταν ο ρυθμός παλμού βήματος εισόδου συμπίπτει με τη φυσική συχνότητα ταλάντωσης του ρότορα. Συχνά υπάρχει μια περιοχή συντονισμού γύρω στην περιοχή 100 – 200 pps και επίσης μία στην περιοχή υψηλού ρυθμού παλμού βήματος. Το φαινόμενο συντονισμού ενός κινητήρα βημάτων προέρχεται από τη βασική του κατασκευή και επομένως
δεν είναι δυνατόν να εξαλειφθεί εντελώς. Εξαρτάται επίσης από τις συνθήκες φόρτισης. Μπορεί να μειωθεί
με την οδήγηση του κινητήρα σε λειτουργίες μισού ή μικροβήματος.
Όταν εφαρμόζεται ένας παλμός βήματος σε έναν κινητήρα βημάτων, ο ρότορας συμπεριφέρεται με τρόπο όπως ορίζεται από την παραπάνω καμπύλη.
Ο χρόνος βήματος t είναι ο χρόνος που χρειάζεται ο άξονας του κινητήρα για να περιστραφεί κατά μία γωνία βήματος μόλις εφαρμοστεί ο πρώτος παλμός βήματος.
Αυτός ο χρόνος βήματος εξαρτάται σε μεγάλο βαθμό από την αναλογία ροπής προς αδράνεια (φορτίο) καθώς και από τον τύπο του οδηγού που χρησιμοποιείται.
Δεδομένου ότι η ροπή είναι συνάρτηση της μετατόπισης, έπεται ότι θα είναι και η επιτάχυνση. Επομένως, κατά την κίνηση σε μεγάλα βήματα, αναπτύσσεται υψηλή ροπή και κατά συνέπεια υψηλή επιτάχυνση. Αυτό μπορεί να προκαλέσει υπερβολές και κουδούνισμα όπως φαίνεται. Ο χρόνος καθίζησης T είναι ο χρόνος που χρειάζονται αυτές οι ταλαντώσεις ή το κουδούνισμα για να σταματήσουν. Σε ορισμένες εφαρμογές αυτό το φαινόμενο μπορεί να είναι ανεπιθύμητο. Είναι δυνατόν να μειωθεί ή να εξαλειφθεί αυτή η συμπεριφορά με μικροβήματα του κινητήρα βημάτων. Για περισσότερες πληροφορίες σχετικά με τα μικροβήματα, συμβουλευτείτε τη σημείωση μικροβημάτων.


 Το μήνυμά σας πρέπει να αποτελείται από 20-3.000 χαρακτήρες!
Το μήνυμά σας πρέπει να αποτελείται από 20-3.000 χαρακτήρες!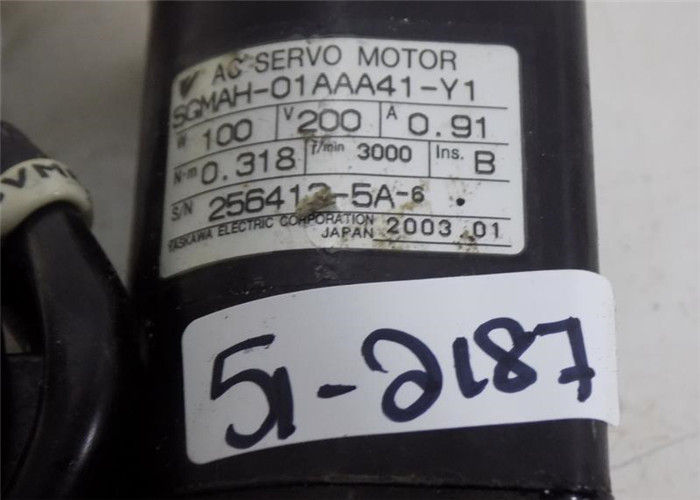
Συνολική Αξιολόγηση
Εικόνα βαθμολόγησης
Ακολουθεί η κατανομή όλων των αξιολογήσεωνΌλες οι κριτικές